因應學習機器人的熱潮,開啟了這一系列文章,上一篇:如何踏入機器人的學習大門III-機器人動起來,學習機器人中最重要有五個科目「機構、動力、控制、互動、智能」,上一篇則是以「動力」為主,這一篇則是要探討「控制」。
「控制」機器人的方式大致上分為有線與無線,可能是實體的搖桿,也可能是無形的電腦程式,但在我們探討這些控制方式以前,應先了解機器人如何處理這些訊號,以釐清所需控制的物件。
什麼是IPO
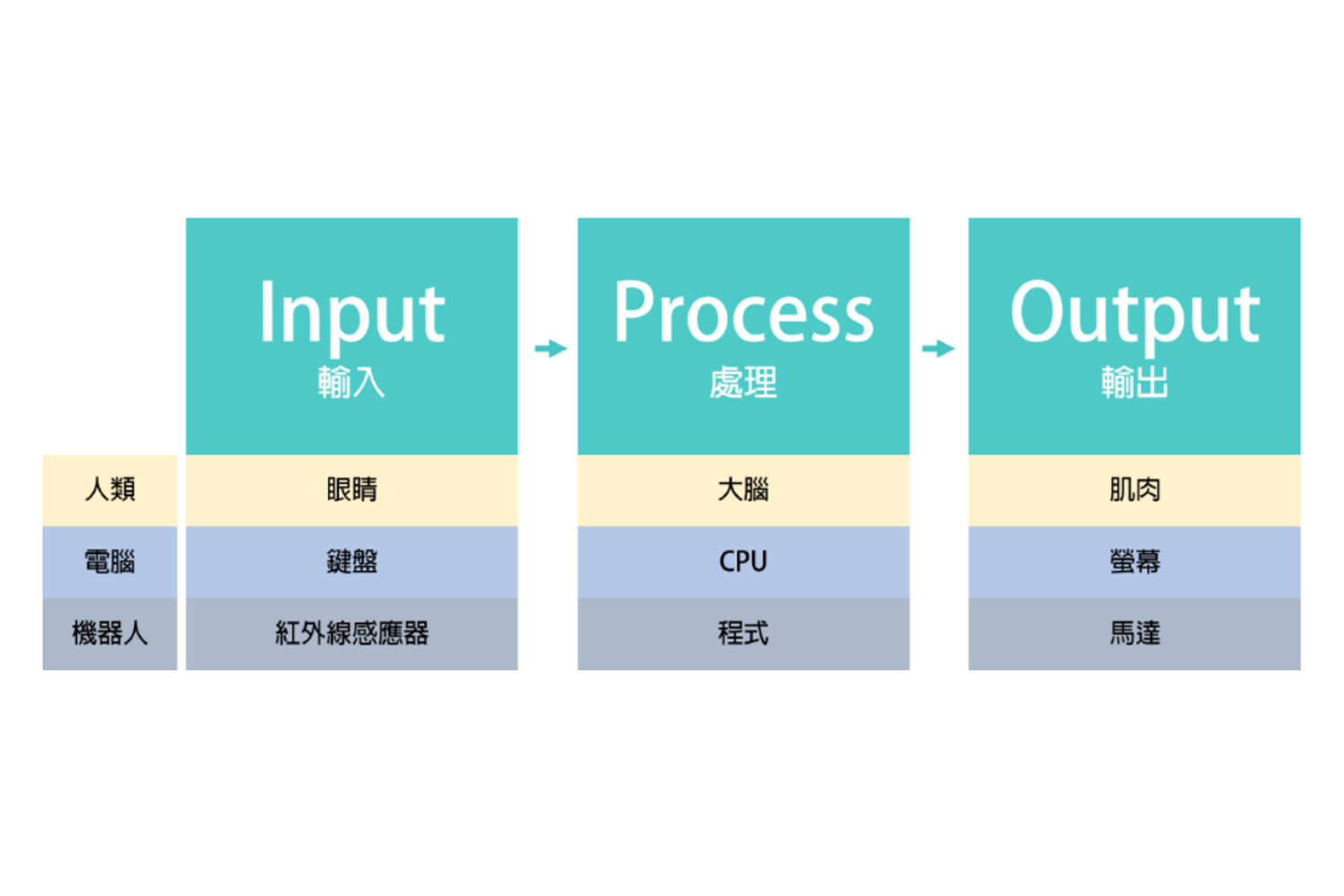
IPO是Input Process Output的縮寫,代表著輸入、處理、輸出。在人類身上也會有IPO的狀況,舉個例子來說,當我們在開車時,「看到」前方有人,「想到」可能會撞到他,所以「執行」了煞車的動作。在這個過程中,眼睛是輸入的管道,大腦是處理的中心,大腿是輸出指令的物件。當我們使用電腦也存在著IPO,一個簡單的打字動作,鍵盤為輸入端,CPU為處理端,螢幕則為輸出端。
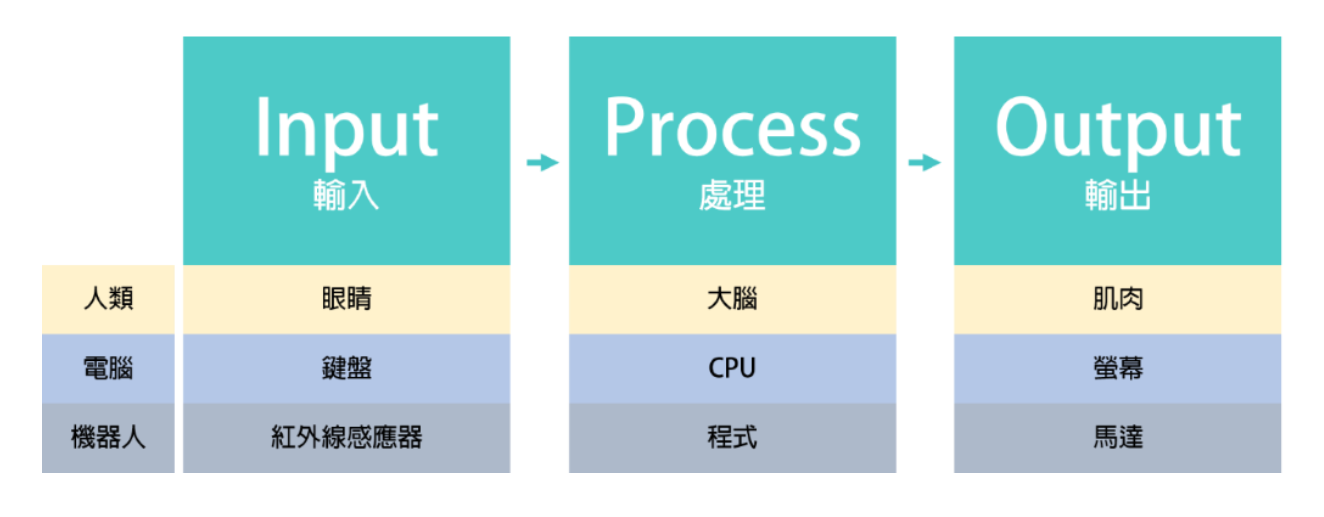
機器人的輸入、處理、輸出
在製作一個機器人之前,我們應明確的知道它的IPO是什麼。假設今天要製作一台自動駕駛機器人,功能為看到障礙物會停下來。我們必須先釐清何為「輸入」,對於人類來說看到東西之後停止,輸入端為眼睛,然而在機器人的領域中,常見的選擇為紅外線感應器或是超音波感應器。「處理」往往在於人類身上是相當快速與自然的,而機器人並非人類這麼聰明,它們就像是完全服從命令的軍人,一個指令一個動作,在下達指令以前,它們並不知道要執行動作,而下達指令的方式,就是程式。在自動駕駛機器人的案子中,我們可以撰寫當紅外線感應器感應到障礙物,則執行什麼動作,這時候就到了輸出端。「輸出」代表著是執行的動作,我們能夠看到或是聽到的一些行為,以自動駕駛機器人它的輸出端可以是馬達,也可以同時包含蜂鳴器。這樣就在快撞到時,停止馬達轉動,並且發出聲響。
機器人領域常見的輸入、輸出元件
這邊整理一些在機器人的領域上,常見的輸入與輸出的元件。
輸入:
- 紅外線感應器:可以偵測前方是否有物品。
- 超音波感應器:可以偵測前方物品的距離。
- 微動感應器:可以偵測是否有被按壓。
- 光線感應器:可以偵測目前光線的數值。
輸入:
- LED燈:依照不同的LED有不同的色光。
- 蜂鳴器:可以發出聲響的元件。
- 直流馬達:可以執行360度旋轉的馬達。
- 伺服馬達:可以控制大約0-180度的馬達。
總結一下,這篇文章為這系列文章的第四篇,我們探討了機器人的IPO,在控制的領域中,釐清了我們所控制的元件。下一篇我們將會探討「互動」的領域,了解機器人如何與外界互動,又或是機器人如何與機器人互動。
還沒有讀過我們的「如何踏入機器人的學習大門」系列文章嗎?
建議從第一篇開始,一步一步跟著我們學習!