因應學習機器人的熱潮,開啟了這一系列文章,上一篇:如何踏入機器人的學習大門I-機器人的學習概要,我們簡單概述了學習機器人最重要的五個科目「機構、動力、控制、互動、智能」,這一篇則是以「機構」為主,一起探討機器人機構上所擁有的無限可能。
以機構來說,機器人大致上可以分為兩個類別:沒有形體跟有形體。
機器人到底長什麼樣子
說起沒有形體的機器人,它們其實早已滲入人類的生活中,它們可能是我們手機裡的語音助理siri、Google Assistant、小米的智能音箱小愛同學。又或者是2016年在圍棋大賽上打敗了頂尖棋手的AlphaGo,它們皆是我們所稱呼的機器人,然而沒有實體的形狀,它們其實只是一段相當複雜的程式碼所構成。這種類型的機器人通常會擁有比較強大的程式功能,才會被人類認定為是一種機器人,像是可以與人類一問一答,與人類共同進行遊戲或者是比賽。雖然說它們沒有形體,但當然它們也有所需的硬體像是CPU、電池……等等,只是在這個階段我們先不談,只針對我們所看的到的機構進行探討。
依據機器人功能設計它的機構
通常針對不同的功能,會發展出不同的機構設計,也因此,當機器人有移動的需求,我們可能會設計輪子給它,然而如果機器人沒有移動的需求,我們將不會特別著重在移動機構上面。不會移動的機器人,這句話也許聽起來很怪,既然它不會移動,又為何不像是其他智能助理一樣,存在於電腦當中就好?關於這個問題,其實最大的原因不外乎是為了滿足人類的想像。近幾年台灣便利商店,開始推出智慧超商,一進到便利商店,機器人店長並會熱情的打招呼,雖然機器人並沒有移動的功能,但機器人的亮麗造型已成功吸引消費者的目光。

機器人的移動機構
家裡的掃地機器人、銀行常見的Pepper機器人、展覽中的跳舞機器人皆屬於移動式機器人。機器人上常見的運動機構有「輪軸」、「連桿」、「足類」。
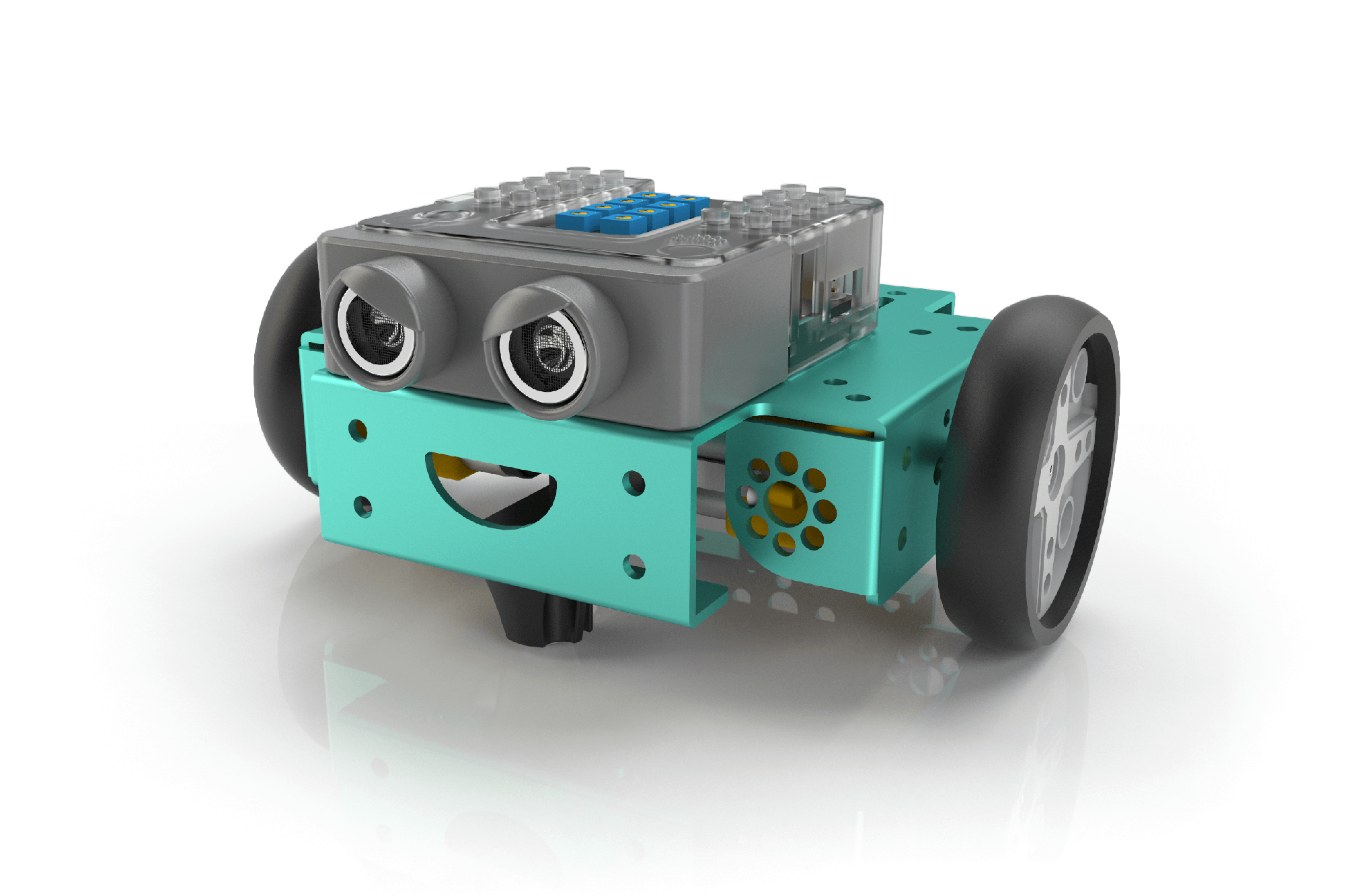
以輪軸來講,其實就像是我們的汽車,會以輪胎當作移動的工具,以機器人的學習來說,是較為入門的移動方式。它就像是我們小時候玩四驅車一樣,有輪胎、有馬達,小朋友都可以輕易地完成組裝。
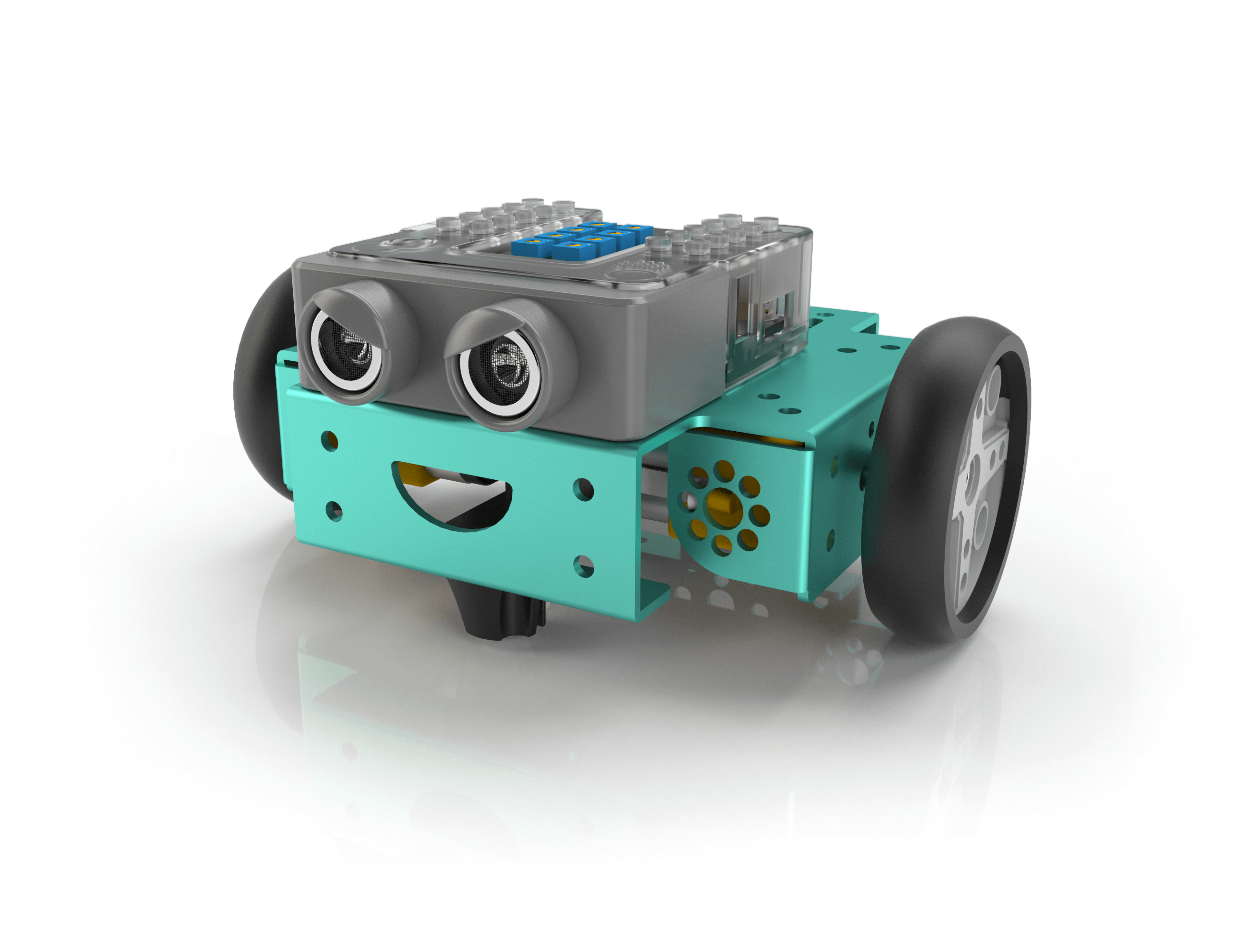
輪軸系統 (圖片來源:璞學智慧)
以連桿來講,能利用機構帶動機構,製造出連動的效果。最知名的連桿設計,大概莫過於荷蘭藝術家泰奧楊森所設計的仿生獸(Strandbeast),以機器人的學習來說,連桿的移動方式確實較為複雜,但它也是學習簡單連桿概念的好方式。

連桿系統 (圖片來源:璞學智慧)
以關節系統來講,其實是一種仿生的概念,我們希望機器人與人類或甚至是狗一樣,可以有雙足或是四足。以機器人的學習來說,是較為進階的移動方式,它必須克服較多的平衡、重心……等問題。
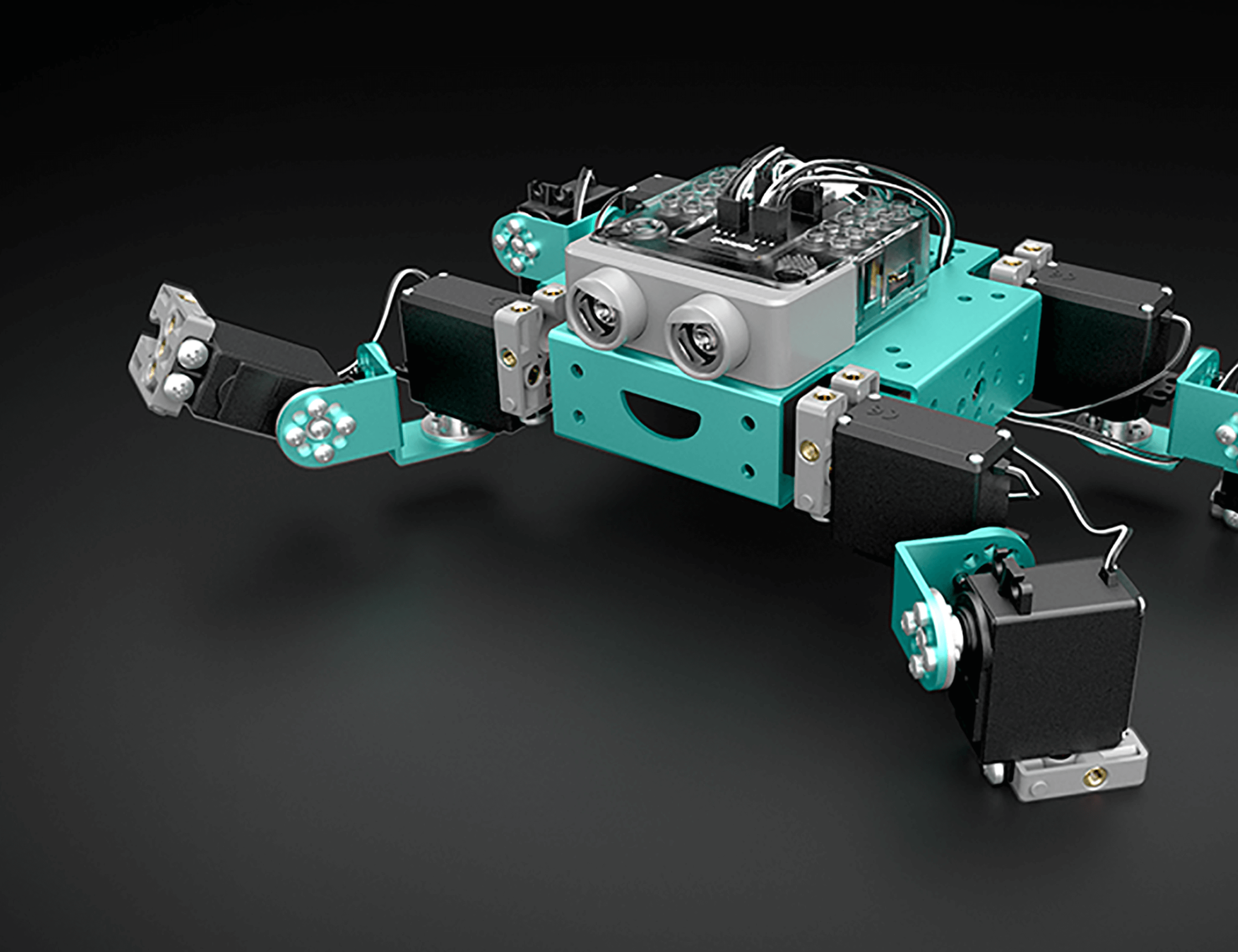
關節系統 (圖片來源:璞學智慧)
總結一下,這篇文章為這系列文章的第二篇,我們探討了機器人的型態,將簡單機器人分為有形體跟沒形體,並介紹了三種移動的機構。下一篇我們將會深入探討「動力」的領域,一起探討機器人動起來的原因。