因應學習機器人的熱潮,開啟了這一系列文章,上一篇:如何踏入機器人的學習大門V-感應器與機器人,學習機器人中最重要有五個科目「機構、動力、控制、互動、智能」,上一篇則是以「互動」為主,而本篇則是此系列的最終篇,我們將要探討「智能」的領域。
還記得我們在前面的文章中曾討論的IPO嗎?(如何踏入機器人的學習大門IV-了解IPO(輸入、處理、輸出)),當時我們著重於I(Input)與O(Output),並未深談中間的P(Process),而智能的領域即是重視中間的「處理」下達了什麼指令。
何謂智能機器人?
談到機器人的智能,大概各種電影場景已陸續浮現腦中,像是星際大戰中的C-3PO以及BB-8,又或是戰鬥天使中的艾莉塔。人類並不缺乏對於擁有高度智慧機器人的想像力,然現今科技卻還未能完美呈現人類的想像中的智能機器人。至今最接近人類想像中的智能機器人大概就是索菲亞(Sophia)了,索菲亞在2017年已得到沙烏地阿拉伯的公民資格,當然陸續仍有許多專家學者抨擊沙國頒予公民資格的這項動作,然索菲亞這個機器人卻真實存在。

如何打造智能機器人
初次踏入學習機器人的領域,我們不可能一開始就能製作相似於索菲亞的機器人。然而,我們可以將機器人的行為分成三級來談,包含:不含邏輯的行為、含邏輯的行為、含邏輯與機器學習的行為。
由於機器人不像人類,他需要明確的指令去執行動作,在尚未給予任何指令時,它們並不會有任何反應。因此,當我們要完成一個機器人之前,皆應好好想想機器人的IPO是什麼?假設今天我們要設計一台自動駕駛車,它的Input為感應器、Output為馬達,在Process的階段,我們可以先處理「不含邏輯的行為」,在此案例中,不停轉動的馬達即是不含邏輯的行為,撰寫前進的指令,並不牽扯任何邏輯,只有簡單的「前進」與「不前進」。進入「含邏輯的行為」可以加入感應器,並撰寫IF…THEN的指令,如果超音波偵測前方有障礙物則應該停止馬達運轉。最後進入「含邏輯與機器學習的行為」可以增加有AI影像判斷的攝影機,讓機器人可以進行障礙物的辨識。
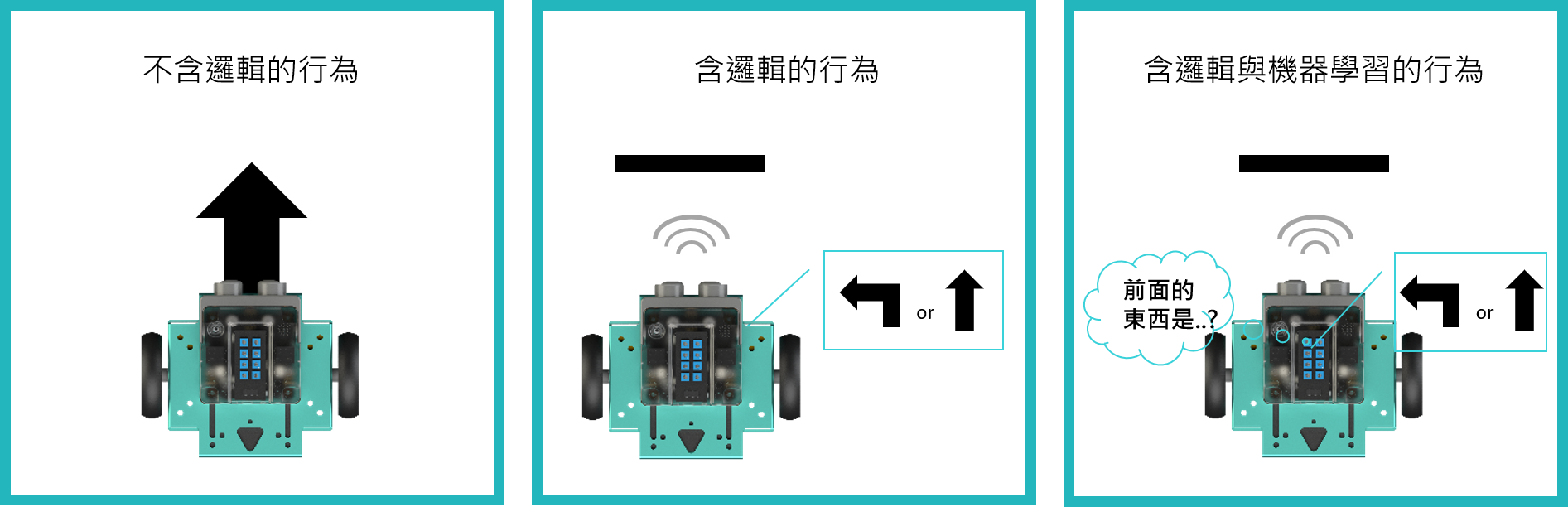
圖片來源:璞學智慧
以下整理三個級別的例子-以自動駕駛車為例:
- 不含邏輯的行為:開機之後不停轉動的馬達。
- 含邏輯的行為:超音波感應器偵測前方30公分是否有障礙物,如果有即停止馬達。
- 含邏輯與機器學習的行為:超音波感應器偵測前方30公分是否有障礙物,且利用AI技術辨識前方障礙物是否為人,如果是則停止、並執行蜂鳴器。
適合新手的程式應用工具
這邊推薦幾種符合新手的機器人程式應用工具,然這些工具的使用年齡也建議於10歲以上。
- FlipRAS–針對第一級玩家,不含邏輯的控制各式馬達。
在FlipRAS中可以控制直流馬達與伺服馬達,並且以時間軸的概念貫穿整個執行方式。當設定完所想的馬達動作後,按下執行的按鈕,即可依照所編排的時間順序「即時」看到機器人的執行結果,這對於初學機器人的學習者而言,是相對於簡單且擁有即時回饋的程式軟體,可以即時看出動作設計的準確性,進而進行調整。而FlipRAS中所設計好的腳本,也可以直接匯入FlipCode進行後續的邏輯訓練。 - FlipCode-針對第二級玩家,含邏輯的行為設計。
在FlipCode中可以撰寫許多的邏輯判斷,因FlipCode是基於Arduino Code所開發的拼圖軟體,整個環境是基於「初始化」與「重複執行」兩個區塊進行運行,除了可以接收FlipRAS的腳本外,也包含許多邏輯與感應器的拼圖,可以完整的撰寫出避障機器人、清潔機器人、畫畫機器人、空氣鋼琴機器人……等等。
- FlipAIOT-針對第三級玩家,含邏輯與AI機器學習的行為。
在FlipAIOT中包含了現今常見的AI模組,將AI的難度下降至可以直接應用的程度,使用者不需要撰寫任何一句AI的程式語言,但卻可以從中了解AI的運作模式,在運用的過程中,去理解人工智慧的使用邏輯。FlipAIOT一樣可與FlipRAS與FlipCode進行結合,讓學習可以一層一層的堆疊上去不中斷。
恭喜各位看完了本系列文章,希望可以幫助初次學習機器人更加了解在學習機器人的路途中,可以得到哪些知識,以及該如何踏入這個領域,本系列共有六篇文章,從最一開始選擇機器人、認識不同種類的機器人、學習機器人的動力系統、了解機器人的IPO、感應器,以及最終篇的智能領域,我們簡單交代了在機器人學習上最重要的五大科目,期望各位皆能在機器人的學習之旅得到豐富的收穫!
還沒有讀過我們的「如何踏入機器人的學習大門」系列文章嗎?
建議從第一篇開始,一步一步跟著我們學習!
如何踏入機器人的學習大門 IV -了解IPO(輸入、處理、輸出)